
Page 68 - 《橡塑技术与装备》2026年4期
P. 68
橡塑技术与装备
HINA R&P TECHNOLOGY AND EQUIPMENT
使胶料最终环绕在带束鼓上并形成一条环形带束、胎
面 ;在上述过程中 ;
(1)由于胶料在供料输送带上的实际输送位置是
不确定的,因此,为了实现理想状态下的胶料居中缠
绕在带束鼓,需要带束鼓根据胶料的输送位置进行轴
向移动调整。
(2)胶料在输送前的切割过程中,多存在切割长
图 3 线内三鼓三机箱结构立体图 度误差,导致胶料的实际长度存在略大于或略小于带
束鼓周长的问题,导致其在带束鼓上不能形成一条完
带束鼓机箱采用两套独立的伺服动力来控制带束 整、均匀的环形带束、胎面,影响最终轮胎品质。
鼓的旋转和涨缩动作,同时增加的轴向移动纠偏功能, 基于此,该带束鼓纠偏贴合控制系统,实现在生
然而,根据上述结构改进,如何实现束鼓结合供料系 产作业过程中对带束鼓的纠偏贴合控制。
统的供料情况进行相应的轴向移动,还缺少相应的控 如图 5 所示,该带束鼓纠偏贴合控制系统包括 :
制机制,因此,基于此种机构设计一种带束鼓纠偏贴
合控制系统及配套的控制方法,以进一步实现提升设
备的作业精度的目的。
1— 成型鼓机箱 ; 2— 带束鼓机箱 ; 3— 带束鼓 ; 4— 底座 ; 5— 胶料 ;
6— 输送带
图 5 线内三鼓三机箱布局
图像采集系统,其设置在供料输送带的正上方,
1— 成型鼓机箱 ; 2— 带束鼓机箱 ; 3— 成型鼓 ; 4— 带束环 ; 以采集胶料及其下方供料输送带的图像 ;具体地,图
5— 带束鼓 ; 6— 底座
像采集系统包括相机和补光灯,相机以镜头竖直朝下
图 4 线内三鼓三机箱布局
的方式设置。
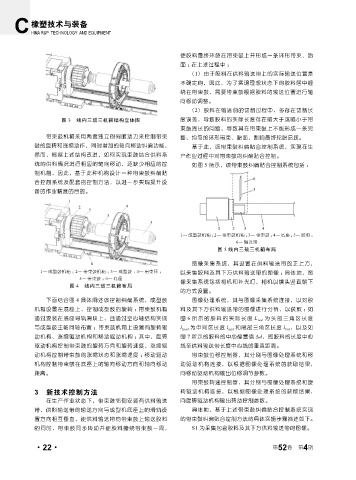
下面结合图 4 具体阐述该控制纠偏系统,成型鼓 图像处理系统,其与图像采集系统连接,以对胶
机箱设置在底座上,控制成型鼓的旋转 ;带束鼓机箱 料及其下方供料输送带的图像进行分析,以获取 :如
通过安装在底座导轨滑块上,且通过空心轴结构实现 图 6 所示的胶料的实际长度 L real 为头部三角区长度
与成型鼓主轴同轴布置 ; 带束鼓机箱上设置有旋转驱 l head 为中间区长度 l mid 和尾部三角区长度 l tail ,以及如
动机构、涨缩驱动机构和移动驱动机构 ;其中,旋转 图 7 所示的胶料的中心偏置值 Δd,即胶料的长度中心
驱动机构控制带束鼓的旋转方向和旋转速度,涨缩驱 线至供料输送带长度中心线的垂直距离。
动机构控制带束鼓的涨缩状态和涨缩速度 ;移动驱动 带束鼓位移控制器,其分别与图像处理系统和移
机构控制带束鼓在底座上的轴向移动方向和轴向移动 动驱动机构连接,以根据图像处理系统的获取结果,
距离。 向移动驱动机构输出位移调节参数。
带束鼓转速控制器,其分别与图像处理系统和旋
3 新技术控制方法 转驱动机构连接,以根据图像处理系统的获取结果,
在生产作业状态下,带束鼓邻侧安装有供料输送 向旋转驱动机构输出转动控制参数。
带,供料输送带的输送方向与成型机底座上的滑轨设 具体地,基于上述带束鼓纠偏贴合控制系统实现
置方向相互垂直,使供料输送带向带束鼓上输送胶料 的带束鼓纠偏贴合控制方法的具体实施步骤描述如下。
的同时,带束鼓同步转动并使胶料缠绕带束鼓一周, S1 为采集包含胶料及其下方供料输送带的图像。
4
·22· 第 52 卷 第 期