
Page 66 - 《橡塑技术与装备》2025年3期
P. 66
橡塑技术与装备
HINA R&P TECHNOLOGY AND EQUIPMENT
作工的取胎方向,辊轴组件 4 安装在定向支架上,主 的力 F 2 ,该两个物理量会分化一部分胎胚重力 G 以及
要为胎胚本体提供支撑。 局部支持力 F 1 的影响,进而减轻胎胚整体的下坠趋势,
因该方案中主要结构与动力均分布在定向支架和 达到控制变形的效果。
辊轴组件上,故下文将重点介绍该部分。
如图 2 所示,为稳定支撑图 1 中的胎胚本体,定
向支架 3 上安装有两组辊轴组件 4,共计 4 个辊筒。
本设计方案中,图 2 上所指的该辊筒为外接电动马达
的电动辊筒,用于保证整个卸胎过程中胎胚本体的旋
转状态(其余 3 个辊筒为从动辊筒),集成模组 5 安装
在定向支架上,主要作用为检测处于旋转状态的胎胚
本体的形状变化。
图 4 胎胚状态示意
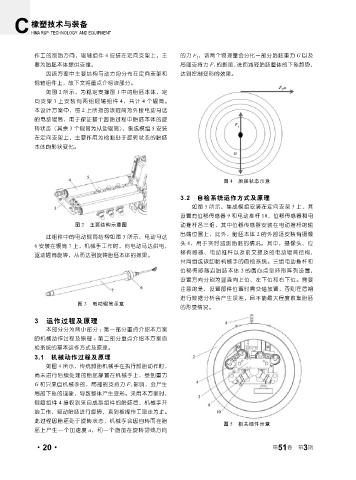
3.2 自检系统运作方式及原理
如图 5 所示,集成模组安装在定向支架 3 上,其
设置有位移传感器 9 和电动推杆 10,位移传感器和电
图 2 主要结构示意图 动推杆各三组,其中位移传感器安装在电动推杆的输
出端位置上,此外,胎胚本体 2 的外部还安装有摄像
此组件中的电动辊筒结构如图 3 所示,电动马达
头 8,用于实时监测胎胚的情况。其中,摄像头、位
6 安装在辊筒 7 上,机械手工作时,向电动马达供电,
移传感器、电动推杆以及前文提及的电动辊筒结构,
驱动辊筒旋转,从而达到旋转胎胚本体的效果。
共同组成该卸胎机械手的自检系统。三组电动推杆和
位移传感器沿胎胚本体 2 的圆心点呈环形阵列设置,
设置方向分别为竖直向上位、左下位和右下位。需要
注意的是,设置部件位置时需交错放置,否则在后期
进行数据分析会产生误差,且不能最大程度收集胎胚
图 3 电动辊筒示意
的形变情况。
3 运作过程及原理
本部分分为两小部分 :第一部分重点介绍本方案
的机械动作过程及原理 ;第二部分重点介绍本方案自
检系统的基本运作方式及原理。
3.1 机械动作过程及原理
如图 4 所示,传统卸胎机械手在执行卸胎动作时,
尚未进行后续处理的胎胚静置在机械手上,受到重力
G 和只来自机械手的,局部的支持力 F 1 影响,会产生
局部下坠的现象,导致整体产生变形。采用本方案时,
辊筒组件 4 接收到来自成型组件的胎胚后,机械手开
始工作,驱动胎胚进行旋转,直到被操作工取走为止。
此过程因胎胚处于旋转状态,机械手会因自转而在胎
图 5 相关组件示意
胚上产生一个加速度 a,和一个施加在旋转切线方向
3
·20· 第 51 卷 第 期