
Page 112 - 《橡塑技术与装备》2025年1月
P. 112
橡塑技术与装备
HINA R&P TECHNOLOGY AND EQUIPMENT
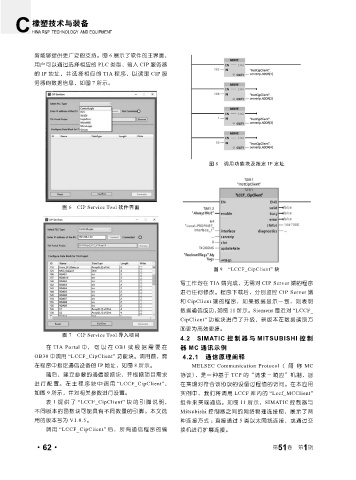
新能够提供更广泛的支持。图 6 展示了软件的主界面,
用户可以通过选择相应的 PLC 类型、输入 CIP 服务器
的 IP 地址,并选择相应的 TIA 程序,以读取 CIP 服
务器的数据信息,如图 7 所示。
图 8 调用功能块及指定 IP 定址
图 6 CIP Service Tool 软件界面
图 9 “LCCF_CipClient” 块
写工作均在 TIA 端完成,无需对 CIP Server 端的程序
进行任何修改。程序下载后,分别监控 CIP Server 端
和 CipClient 端的程序,如果数据显示一致,则表明
数据通信成功,如图 11 所示。Siemens 最近对 “LCCF_
CipClient” 功能块进行了升级,新版本在数据读取方
面更为高效便捷。
图 7 CIP Service Tool 导入项目
4.2 SIMATIC 控制器与 MITSUBISHI 控制
在 TIA Portal 中,可以在 OB1 或根据需要在 器 MC 通讯示例
OB30 中调用 “LCCF_CipClient” 功能块。调用前,需 4.2.1 通信原理阐释
在程序中指定通信设备的 IP 地址,如图 8 所示。 MELSEC Communication Protocol( 简 称 MC
随后,建立必要的通信数据块,并根据项目需求 协议),是一种基于 TCP 的“请求 - 响应”机制,旨
进行配置。在主程序块中调用 “LCCF_CipClient”, 在实现对符合该协议的设备过程值的访问。在本应用
如图 9 所示,并对相关参数进行设置。 实例中,我们将调用 LCCF 库内的 “Lccf_MCClient”
表 1 提 供 了 “LCCF_CipClient” 块 的 引 脚 说 明, 组件来实现通信。如图 11 所示,SIMATIC 控制器与
不同版本的函数块可能具有不同数量的引脚。本文选 Mitsubishi 控制器之间的网络物理连接图,展示了两
用的版本号为 V1.0.5。 种连接方式 :直接通过 5 类以太网线连接,或通过交
调用 “LCCF_CipClient” 后,所有通信程序的编 换机进行扩展连接。
1
·62· 第 51 卷 第 期